ATCart RC Assemble Set¶
This ATCart RC assemble set has two purposes of usage,
Operate manually like RC car
Operate with other flight controller such as Cubepilot.

RC Assemble Set Hardwares¶
In the pacakge, you could see the following items,
ATCart motors and ESC
Cart frame
Controller box
CARTIF board
Futaba radio transmitter & receiver
6 cells LiPo battery
Cable connection
CARTIF board¶
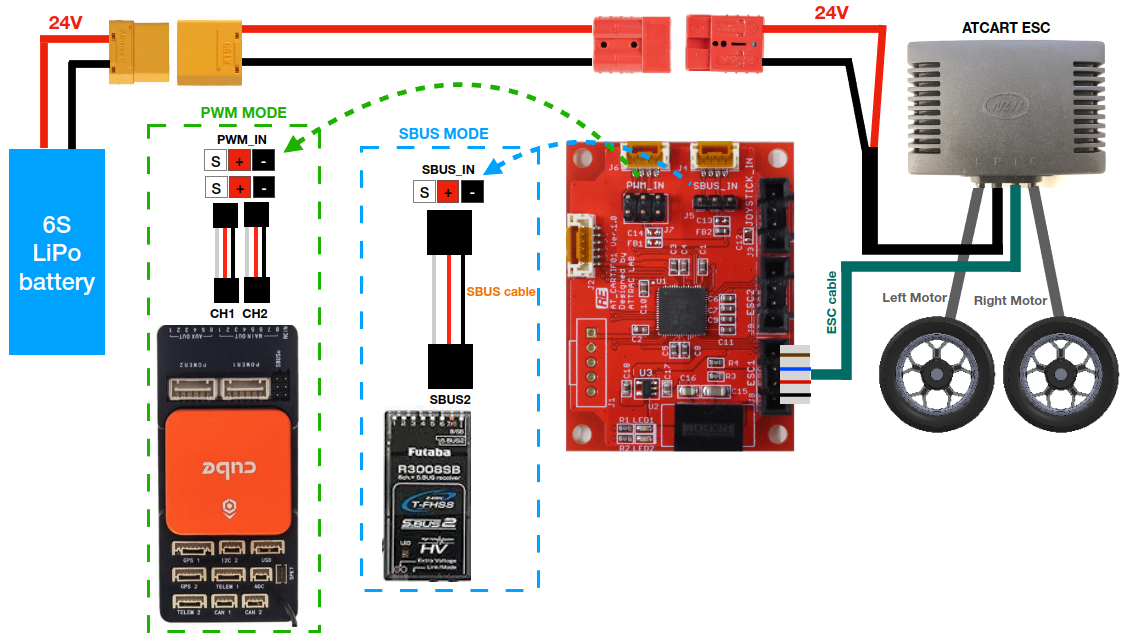
This CARTIF is designed to convert SBUS values or PWM values of left/right wheels to ATCart ESC data packets.
On SBUS mode you can plug on the SBUS output from radio receiver to SBUS port of CARTIF, then channel1 is assigned as Steering and channel2 is assigned as Throttle.
On PWM mode you can plug on PWM output from radio receiver or any microcontroller or flight controller which can generate PWM signal to connect to PWM port 1 and 2 of CARTIF. Each PWM channel is for each left or right wheel.
Please choose either of SBUS mode or PWM mode according to your hardware and application, you can check the wiring diagram of image below.
Test Manual Drive¶
Make sure every connection is connected except the battery, then you can power on by plug the battery lastly. If you are using SBUS mode, then ATCart could be controlled from radio controller immediately. You can switch on channel5 (Switch E) to middle or Manual mode. Then you could try SLOWLY push the left stick up-down to make the cart go forward and backward we call this stick as Throttle. Then try SLOWLY push the right stick left-right to make the cart turning we call this stick as Steering. When the flight mode is in HOLD, both sticks are disabled, and the cart will stop moving.
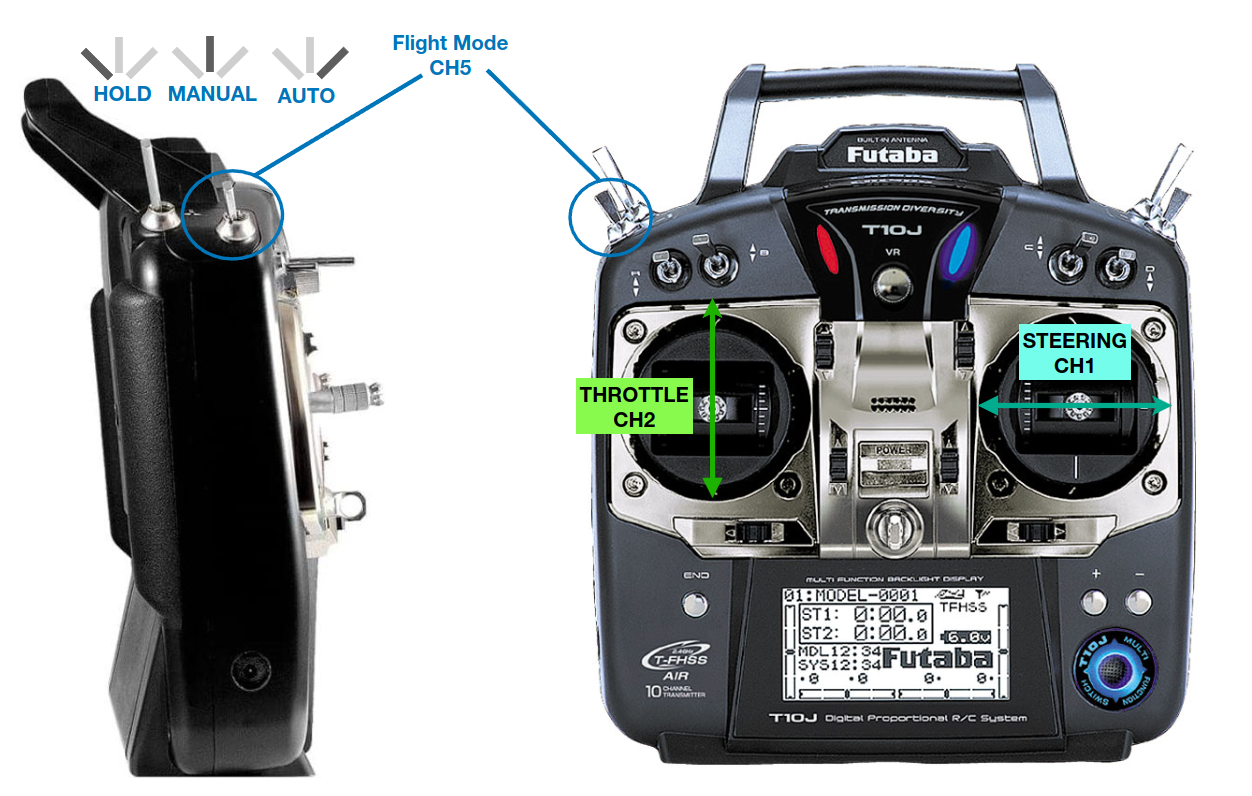
Because when using SBUS mode, there is no Auto mode.
If you have flight controller, for example like Cubepilot, it could generate PWM signal from MAIN_OUT port so we need to setup in Mission Planner to output channel1 for left wheel and channel2 for right wheel. So the flight controller is taking care of flight mode and mixing program. For more detail please check on Ardupilot Wiki documentation.