ATCrawler Basic with Cubepilot¶
The ATCrawler basic assemble set allow you to use Cubepilot as a flight controller.
Once you have the ATCrawler basic with you, it would come with our custom ESC for high power driven motors the AT_MOTOR-DRIVER_100A_2ch_ver.9.0 with aluminum heatsink attached on the box’s lid.
To use ATCrawler basic as ArduRover for Ardupilot, please follow the connection diagram below.
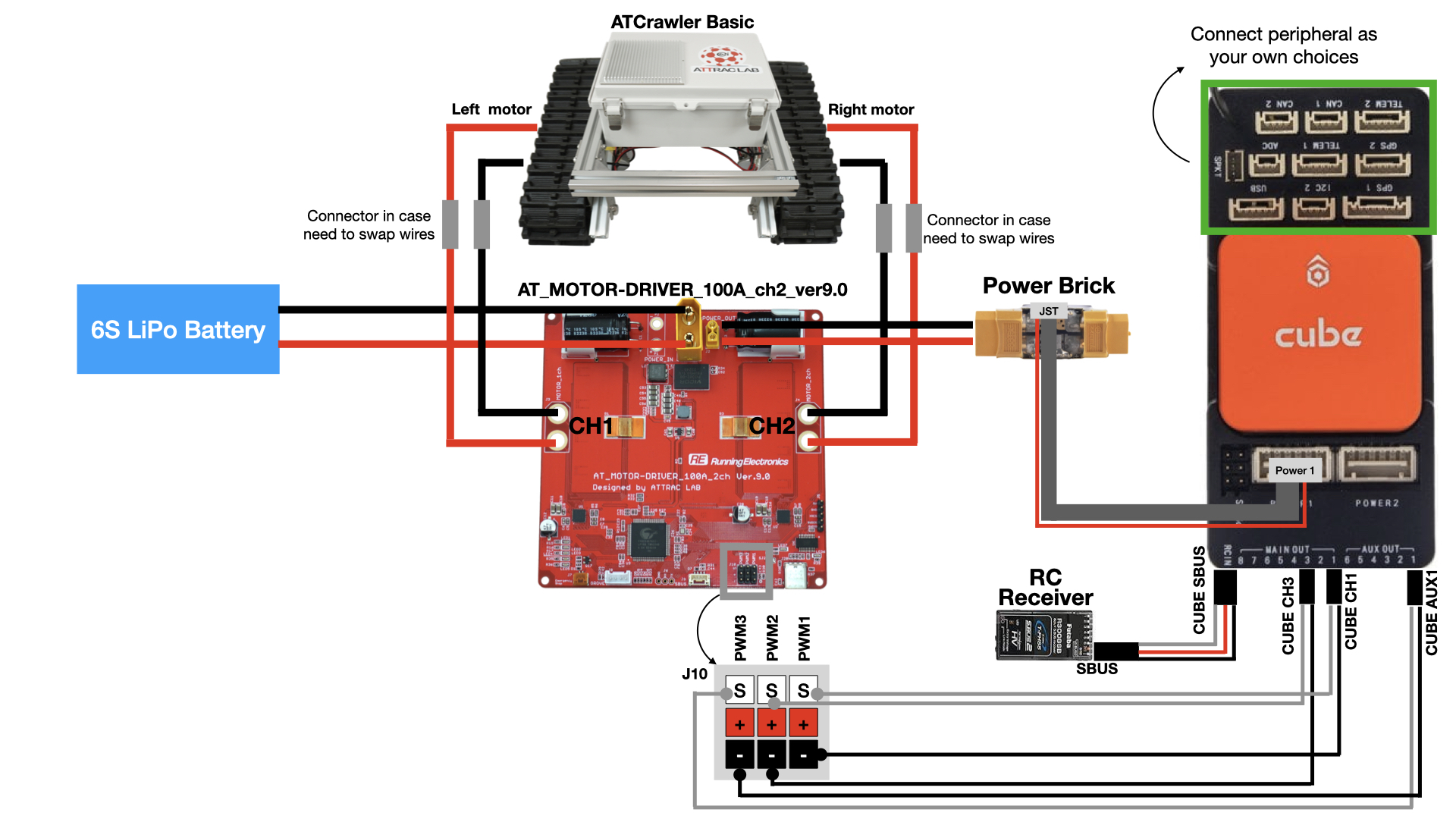
From the diagram, CUBE Orange is used but you can use any model of Cubepilot.
From CUBE MAIN OUT CH1 -> ESC PWM1
From CUBE MAIN OUT CH3 -> ESC PWM2
From CUBE AUX OUT CH1 (SERVO9) -> ESC PWM3
Note
This AT_MOTOR-DRIVER_100A_2ch_ver.9.0 has two control methods,
to control by PWM signal (PWM ports)
to control by ROS topic (USB port).
In order to use it in PWM mode, ESC PWM3 has to be on PWM neutral (~1500us), and that’s why we need AUX OUT CH1 as extra pin.
Ardupilot Parameters¶
Similar to other PWM driven ESC vehicle, we need to specify the servo output according to rover frame type. The ATCrawler basic is working similar to skid-steer rover.
SERVO1_FUNCTION = 73 (Throttle Left)
SERVO3_FUNCTION = 74 (Throttle Right)
SERVO9_FUNCTION = 135 (SERVOn_TRIM)
When Cube is booted up, the AUX CH1 or SERVO9 will output neutral PWM signal then the ESC will be changed to PWM control mode.
For other parameters, it has the same setup process as explain on Ardupilot documentation First Time Setup, please setup other peripheral such as Radio, telemetry, GPS, compass, and etc.