ATCrawler BLDC with Cubepilot¶
The ATCrawler BLDC set allow you to use Cubepilot as a flight controller.
To use ATCrawler BLDC as ArduRover, please follow the connection diagram below.
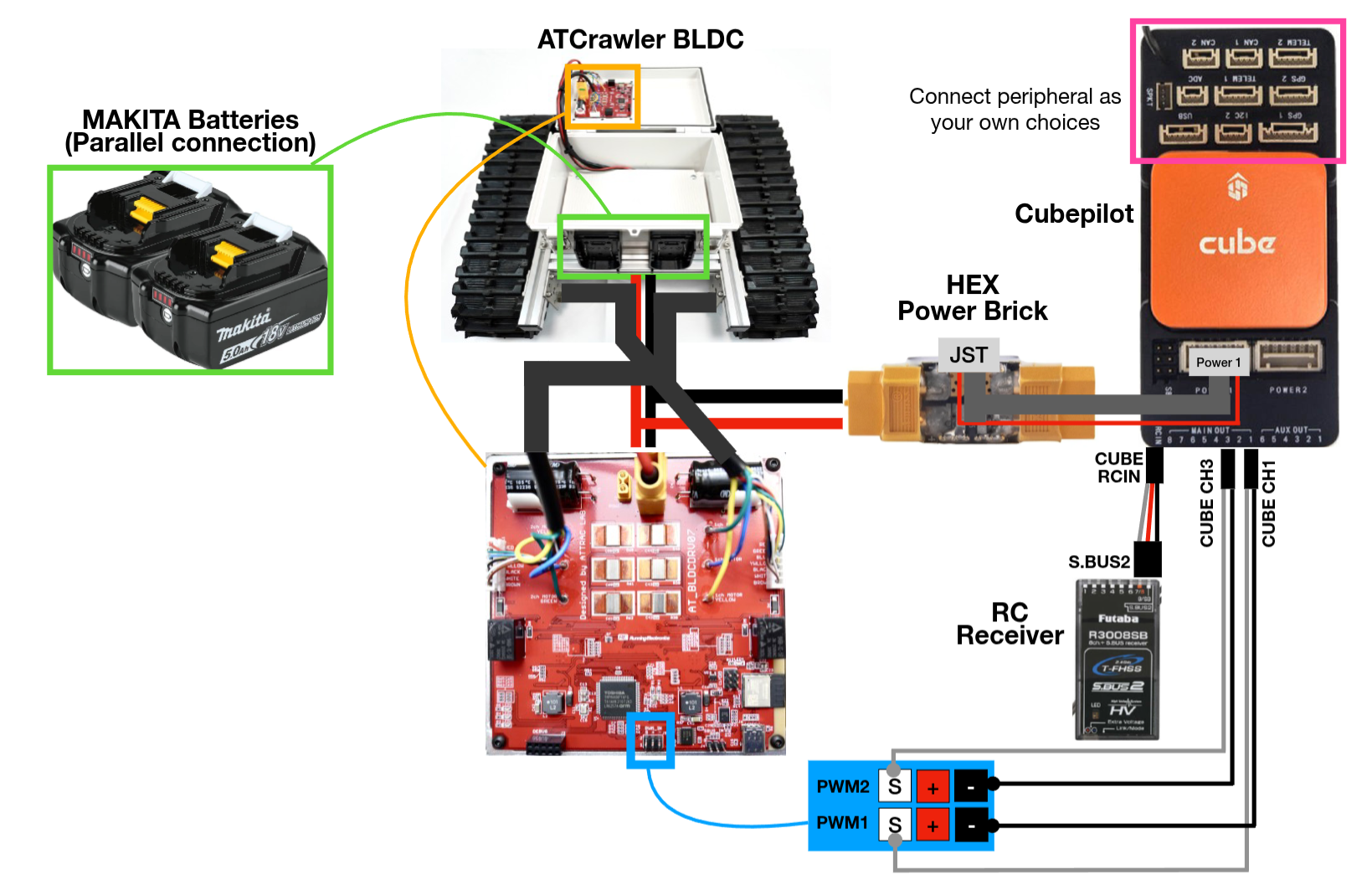
From the diagram, CUBE Orange is used but you can use any model of Cubepilot.
From CUBE MAIN OUT CH1 -> ESC PWM1
From CUBE MAIN OUT CH3 -> ESC PWM2
Note
This AT_BLDCDRV07 board has two control methods,
to control by PWM signal (PWM ports)
to control by ROS2 topic (USB port).
In order to use it in PWM mode, we just need to connect PWM port to Cubepilot.
Setup Ardupilot Parameters¶
Similar to other PWM driven ESC vehicle, we need to specify the servo output according to rover frame type. The ATCrawler BLDC is working similar to skid-steer rover.
SERVO1_FUNCTION = 73 (Throttle Left)
SERVO3_FUNCTION = 74 (Throttle Right)
BRD_SAFETY_DEFLT = 0 (Disable)
BRD_SAFETY_MASK = 0 (Disable)
RCMAP_ROLL = 1 (Steering Channel on Radio)
RCMAP_THROTTLE = 2 (Throttle Channel on Radio)
MOT_THR_MIN = 10 (10% at minimum)
For other parameters, it has the same setup process as explain on Ardupilot documentation First Time Setup, please setup other peripheral such as Radio, telemetry, GPS, compass, and etc.